A robot képes kamerát és egyéb érzékelőket hordozni, és úgy mozog, hogy vizet lövel ki a testéből.
Egy új tintahalszerű robot képes egyedül úszni és képeket készíteni.
A gépet mélytengeri felfedezésekhez építették a San Diegó-i Egyetem kutatói.
A robot vízsugarakat kilövelve hajtja magát, nagy mennyiségű vizet visz be a testébe, majd összepréseli, hogy kilője maga mögött.
A gép teste akril polimerből készült, 3D nyomtatással és lézerrel kivágott alkatrészek támogatják működését. Könnyű teste nem sérti meg a halakat és a korallokat, és könnyebben tud manőverezni is, mint a nagyobb, merevebb robotok.
A tintahal „bordái” két kör alakú lemezhez kapcsolódnak, az egyik a víz kilövelésére szolgáló fúvókához van rögzítve, a másik pedig vízálló kamerát vagy más érzékelőt tartalmaz.
A kutatók úgy döntöttek, hogy a lábasfejűek osztálya – a tengeri állatok azon csoportja, amely magában foglalja a tintahalakat, a polipokat – a sebesség szempontjából a legjobb választás.
A tintahal képes elérni a vízi gerinctelenek közül a leggyorsabb sebességet, egy természetes sugárhajtási rendszeren keresztül.
A robot megközelítőleg 18-32 centiméter per másodperc sebességet tud elérni, ami nagyjából fél mérföld per óra sebességgel egyenlő, ami gyorsabb, mint a legtöbb könnyű roboté – állítják kutatók.
A valódi tintahal ezzel szemben 23 és 25 mérföld per óra közötti sebességgel képes haladni.
A robotnak saját áramforrása is van, így egy ideig működhet anélkül, hogy más készülékekhez kellene kapcsolódnia.
„Lényegében újrateremtettük azokat a legfontosabb jellemzőket, amelyeket a tintahalak használnak a nagy sebességű úszáshoz. Ez az első ki nem kötött robot, amely sugárimpulzusokat képes előállítani a gyors mozgáshoz, mint a tintahal, és ezeket a sugárimpulzusokat a test alakjának megváltoztatásával érheti el, ami javítja az úszás hatékonyságát” – mondta Michael T. Tolley, az egyetem gépészeti és repüléstechnikai tanszékének professzora.
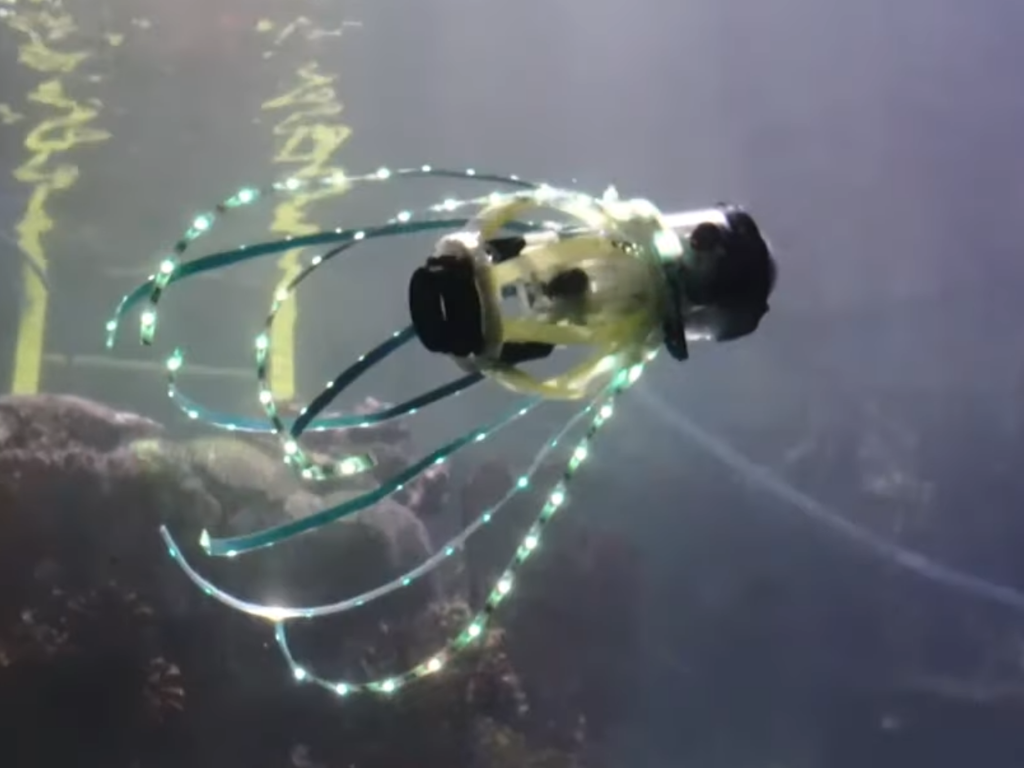
A kutatók először úgy tervezték meg a robotot, hogy egy tartályban úszkáljon, majd egy nagyobb akváriumban tesztelték.
„Miután képesek voltunk optimalizálni a robot kialakítását úgy, hogy a laboratóriumban egy tartályban úszhasson, különösen izgalmas volt látni, hogy a robot sikeresen úszhatott egy nagy akváriumban korallok és halak között, demonstrálva alkalmazhatóságát valós bevetésekhez” – mondta Caleb Christianson, aki a kutatás vezetője volt.
A kutatók eredményeiket a Bioinspiration and Biomimetics című tudományos szakfolyóiratban publikálták.